Python mainpy --num_particles 1000 --kernel_sigma 500. Python from numpy import from numpyrandom.
Optimal Estimation Algorithms Kalman And Particle Filters By Pier Paolo Ippolito Towards Data Science
Runs the basic particle filter.
. Then they can find an exact solution using that simplified model. Whenver running the code a robot localization problem will be si. For this the car is such designed that is takes all the desired steps on its own in order to catch the running away car.
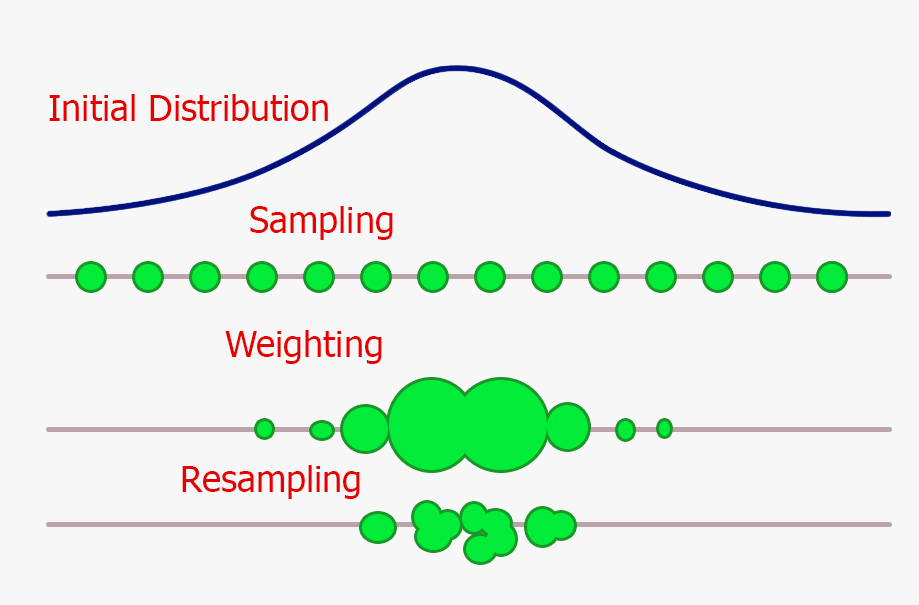
Particle filter is a Monte Carlo algorithm used to solve statistical inference problems. Colloquially we can think of a particle filter as a series of point samples being recursed through the predict-update stages of a Bayesian filter. About Press Copyright Contact us Creators Advertise Developers Terms Privacy Policy Safety How YouTube works Test new features Press Copyright Contact us Creators.
Kalman Filter book using Jupyter Notebook. Compute importance weight 7. The algorithm known as particle filtering looks amazingly cool.
Internationally particle filtering has been applied in various fields. This repo is useful for understanding how a particle filter works or a quick way to develop a custom filter of your own from a relatively simple codebase. Measured repeatedly in some noisy way.
As mentioned in the section above the adaptive Particle Filter changes the number of particles dynamically during the run to reduce the computational. There are more mature and sophisticated packages for probabilistic filtering in Python especially for Kalman filtering if you want an off-the-shelf solution. The green turtle is the actual location while the orange turtle is the estimated location.
Focuses on building intuition and experience not formal proofs. FilterPy is a Python library that implements a number of Bayesian filters most notably Kalman filters. This package implements a bootstrap particle filter that can be used for recursive Bayesian estimation and forecasting.
The main scripts are. Particle filters are tractable whereas Kalmanfilters are not. In the localization example above the state vector contains the position and orientation of a vehicle with respect to a map whereas the econometrics example involves a state vector that represents the value of an asset.
I am writing it in conjunction with my book Kalman and Bayesian Filters in Python a free book written using Ipython Notebook hosted on github and readable via nbviewerHowever it implements a wide variety of functionality that is not described in the book. Algorithm particle_filter S t-1 u t z t. Example forecasts of the prey population x t and the predator.
The standard algorithm can be understood and implemented with limited effort due to the widespread availability of tutorial material and code examples. Algorithms and Applications Ref. Sample index ji from the discrete distribution given by w t-1 5.
Auto Bot 6. 20 01174 IEE Created Date 7312001 11359 P. Particle filtering There are several particle algorithms that one may associate to a given state-space model.
This requires an approximately uniformly coloured object which moves at a speed no larger than stepsize per frame. The superiority of particle filter technology in nonlinear and non-Gaussian systems determines its wide range of applications. Here we consider the simplest option.
A basic particle filter tracking algorithm using a uniformly distributed step as motion model and the initial target colour as determinant feature for the weighting function. Runs the basic particle filter with a lower number of landmarks illustrates the particle filters ability to represent non-Gaussian distributions. Then you can use pypfilt to estimate the state and parameters of this system.
See next tutorial for how to implement a guided or auxiliary filter The code below runs such a boostrap filter for N100 particles using stratified resampling. In this project the turtle location and heading direction in maze was inferred using particle filter. Update normalization factor 8.
The blue line is the Particle Filter path and the red line is the Odometry path. The diversity of samples compensates for the lack of a covariance estimate. In this tutorial we look at a class of sequential Monte Carlo sampling methods and in particular the particle filter.
A tutorial on particle filters for on-line nonlinearnon-gaussian bayesi an tracking - Target Tracking. All exercises include solutions. Welcome to the pypfilt documentation.
In part 2 we will elucidate the mathematics needed to build. The particle filter was popularized in the early 1990s and has been used for solving estimation problems ever since. The particle filter was popularized in the early 1990s and has been used for solving estimation problems ever since.
Robots use a surprisingly simple but powerful algorithm to find out where they are on a map a problem called localization by engineers. In addition the multi-modal processing capability of the particle filter is one of the reasons why it is widely used. For Generate new samples 4.
Outline Motivationandideas Algorithm High-level Matlabcode Practicalaspects Resampling Computationalcomplexity Software Terminology Advancedtopics Convergence. In part 2 we will elucidate the mathematics needed to build. The key idea is that a lot of methods like Kalmanfilters try to make problems more tractable by using a simplified version of your full complex model.
Includes Kalman filtersextended Kalman filters unscented Kalman filters particle filters and more. In the context of particle filters quantities that must be estimated are collected in a state vector. We can see that at some points the Particle Filter adjusts the pose of the robot.
Colloquially we can think of a particle filter as a series of point samples being recursed through the predict-update stages of a Bayesian filter. In this tutorial we look at a class of sequential Monte Carlo sampling methods and in particular the particle filter. Particle Filters Revisited 1.
Self Driven Vehicle using AI in Robotics ie Kalman filters A algorithm PID control localization etcThe basic functionality of this car is just to chase and catch the running away car just like cops. Extensive research has advanced the standard particle filter algorithm to improve its performance and. In this first article we attempt to explain the intuition behind particle filters.
An elaborate tutorial on particle filters in the context of psychology can.

Particle Filter Localization With Python Code Youtube

Particle Filter Algorithm Youtube

Pin On Electronic
Basic Tutorial Particles Alpha Documentation

Sample Localization Based On Particle Filters Home

Particle Filter Explained With Python Code Youtube
Basic Tutorial Particles Alpha Documentation
Particle Filter Tutorial Challenge3 Divergence Py At Master Jelfring Particle Filter Tutorial Github
0 comments
Post a Comment